2022年8月23日,在“唯实杯”第十届全国大学生机械创新设计大赛决赛中,我校机械工程学院李杰、陈思思、周成燚、牟洪量、陈沛康等同学在李永亮、李平两位老师的指导下完成参赛作品《仿生壁虎机器人》喜传捷报,取得我校机械工程学院在该项赛事国赛成绩首次历史性突破——国赛一等奖。
全国大学生机械创新设计大赛是两年一度的大学生科技盛会,是全国大学生机械类学科竞赛的顶级赛事,影响深远,对学生理论知识的学习与实践能力的锻炼意义重大。
本届大赛决赛在深圳技术大学举办,以自然、和谐为主题,参加决赛的高校来自包括国防科技大学、陆军工程大学、空军工程大学、火箭军工程大学、北京航空航天大学、哈尔滨工业大学、华中科技大学、武汉大学、上海交通大学、西安交通大学、厦门大学、天津大学、重庆大学等多个国内知名高校,主要内容围绕着仿生机械、生态修复机械为方向,123所高校共计200个参赛作品。经过决赛的激烈角逐,我校仿生壁虎机器人团队,荣获国赛一等奖。
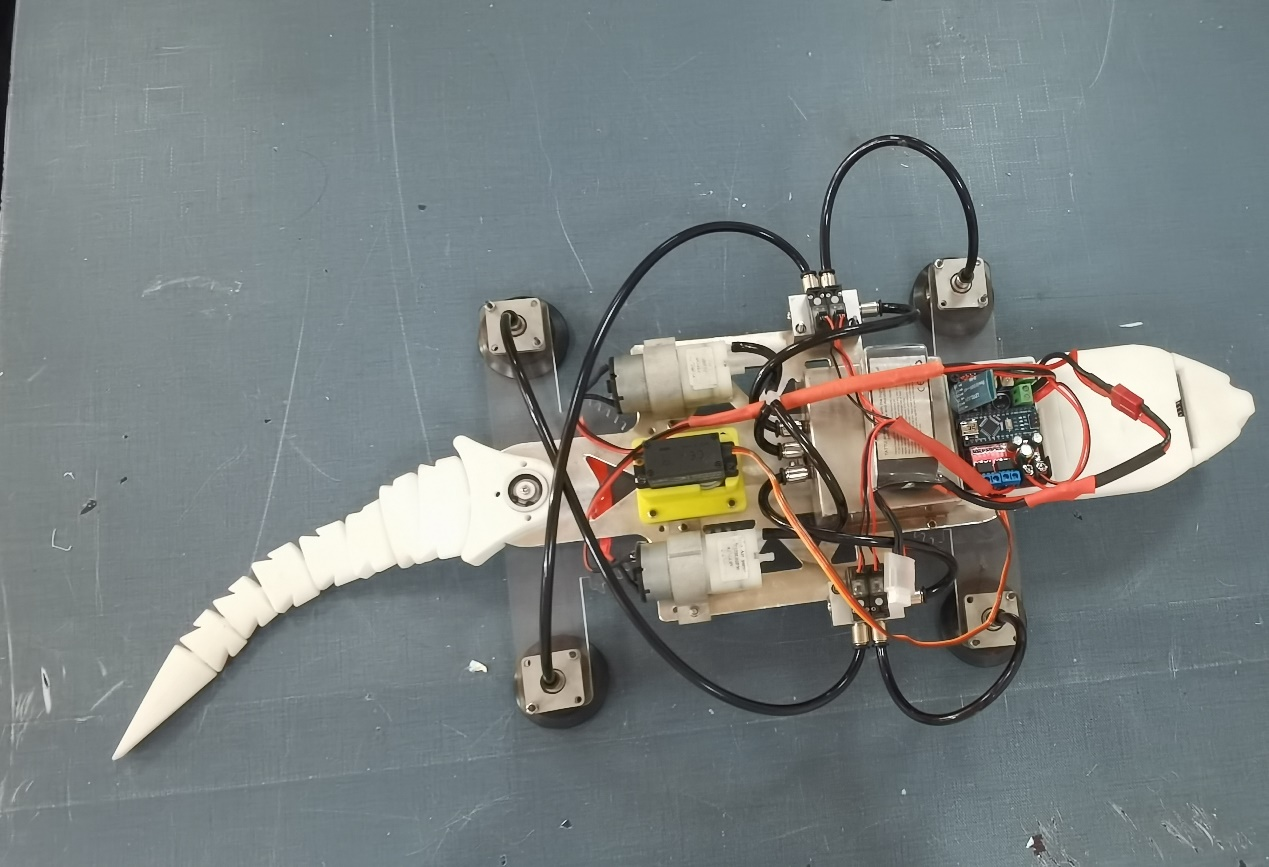
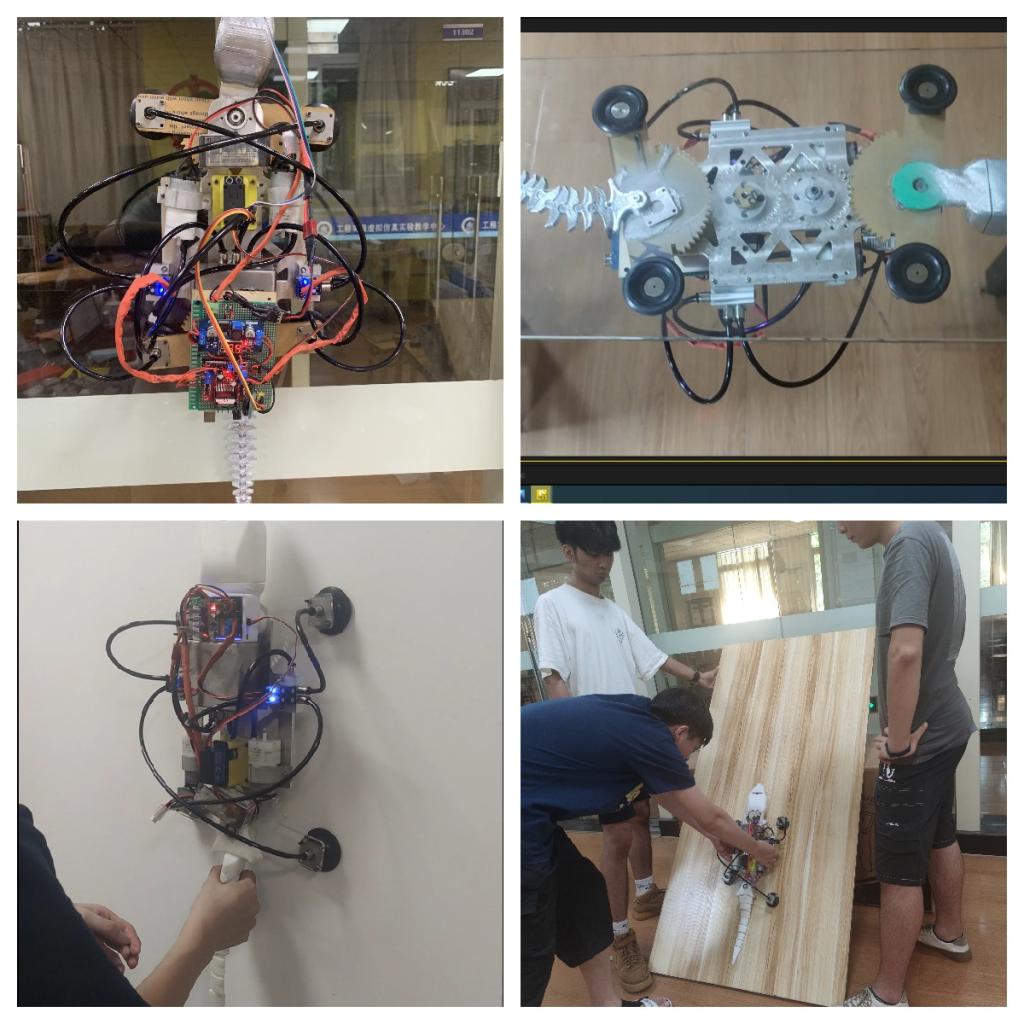
“雄心迈步象牙塔,棋逢对手敢亮剑”。我校参赛作品—仿生壁虎机器人团队的同学们,通过观测与研究壁虎的步态与爬行特点,灵活应用齿轮连杆传动机构创新地设计了单源控制,四足协控的机器壁虎,为了便于吸附墙壁进行爬行,设计了包含微型真空泵、微型电磁阀、真空保护阀、真空储备罐、真空吸盘等部件的真空吸附系统,确保壁虎可以在玻璃或垂直墙壁安全、稳固的爬行。此外,团队的同学们还对仿生壁虎机器人进行了电控系统设计。一方面,利用模块化的概念,对主控板进行了PCB制版设计与加工,强化了其功能模块的快换与扩展功能,同时使电控模块具备了体积小,易安装,高可靠等特点,另一方面,应用C语言对吸附系统、机械传动系统、智慧功能模块进行编程,使得该机器人系统能够安全、稳定地完成垂直墙面爬行(玻璃墙体、建筑外墙、室内墙体等)、转弯、避障,陡坡爬行与避障、远程控制等多种功能,可用于民用外侧高墙及玻璃墙体的清洁,以及桥隧高壁的结构检测等任务。
该成绩的突破是全国同行学者、专家对我校学子参赛作品的高度认可与肯定,同时也是我校机械工程学院在该项赛事二十余载不懈努力的回报,是学院坚持“学、赛、产、研”一体化的实践教学改革收获的硕果,更加坚定了学院以创新能力、解决复杂工程问题的能力和工程实践中的人文精神为主线的“2+1”工程素养人才培养模式。